一、团队介绍
王雪松教授所负责的“人工智能理论及应用”团队共有成员14人,其中教授2人、副教授11人、博士后1人,均具有博士学位,学缘结构合理(博士毕业于中国科学院自动化研究所、北京航空航天大学、东北大学、哈尔滨工业大学、天津大学、南京航空航天大学、重庆大学、中国矿业大学、哈尔滨工程大学等),知识结构互补,具有从事跨学科研究项目的理论基础和实力。
团队主要开展具身智能、强化学习、图像智能解译、机器人技术等应用基础理论与关键技术研究,形成一套智能系统自主感知、规划、决策与控制理论体系和方法,推动相关理论和技术成果在GF、自动驾驶和智能制造等领域的示范应用和推广,取得了重要学术成果和技术创新,并创造了可观经济和社会效益。
团队成员共主持国家自然科学基金项目21项,获教育部自然科学二等奖2项,在IEEE TIP、IEEE TNNLS、IEEE TCYB、IEEE TSMC、IEEE/CAA JAS、IEEE TKDE、自动化学报、计算机学报等国内外Top期刊上发表论文100余篇,出版学术专著9部,授权发明专利50余项,指导的学生获江苏省优秀博士学位论文1篇、江苏省优秀硕士学位论文9篇。
二、主要研究方向
1. 基于强化学习的智能决策与控制
针对传统强化学习方法在自动驾驶等智能系统中存在安全探索困难、样本效率低及缺乏先验知识依赖等问题,提出了一系列安全强化学习方法。
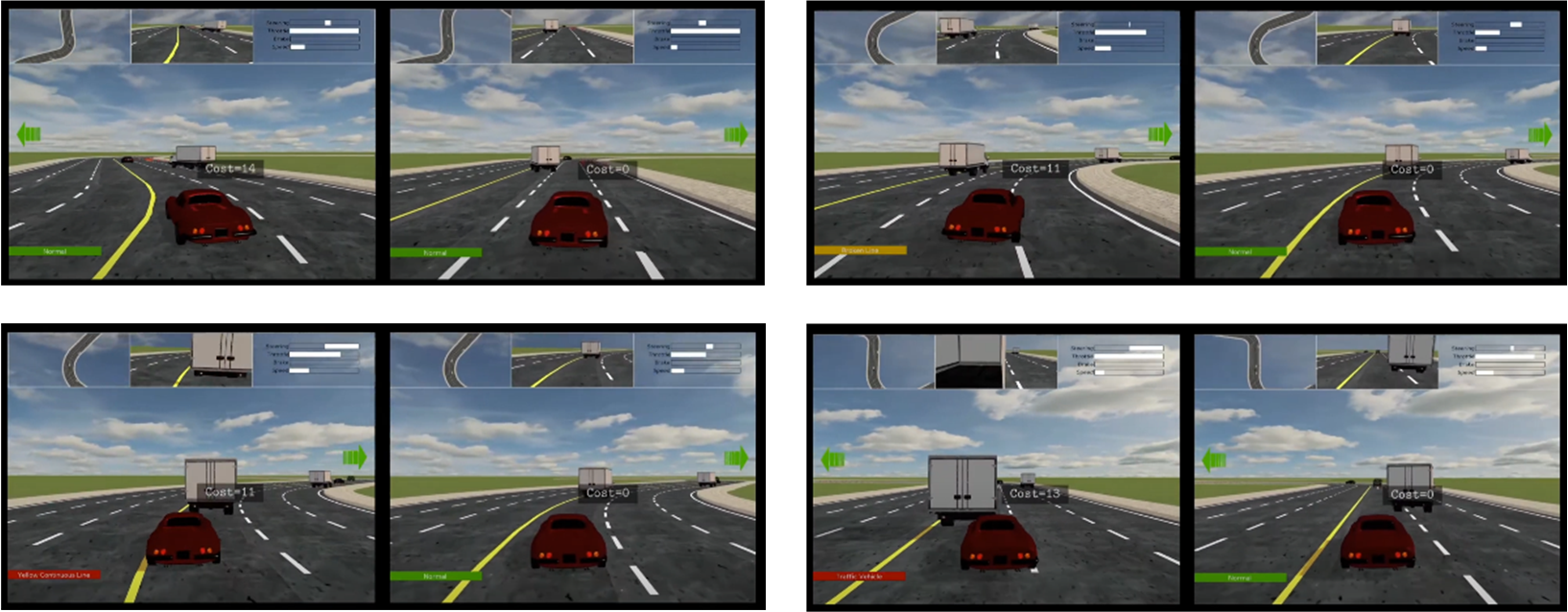
图1 在MetaDrive自动驾驶平台上的车道保持及避让驾驶效果
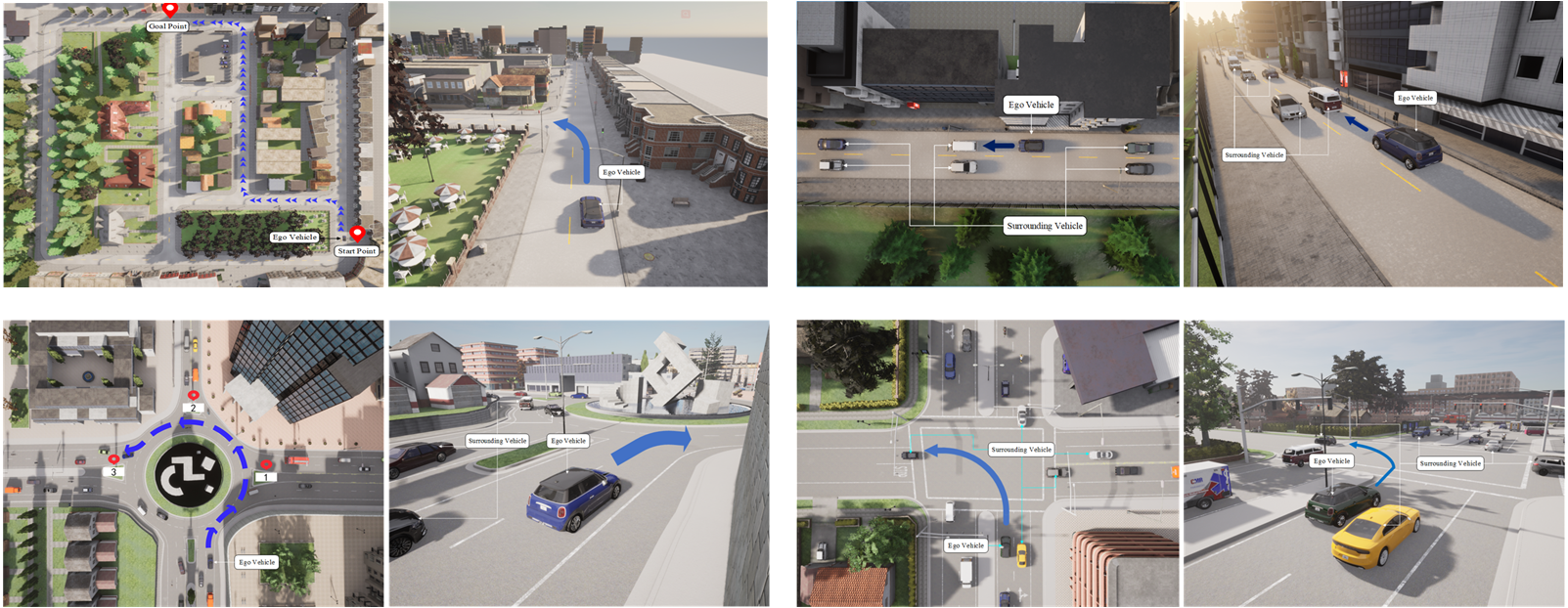
图2 在CARLA自动驾驶平台上的空旷道路行驶、拥堵公路跟车、拥堵环岛绕行以及拥堵十字路口左转驾驶效果
针对传统强化学习方法在机器人移动控制等智能系统中存在学习高维状态表征困难、易受视觉干扰等问题,提出了一系列基于表征的视觉强化学习方法,在需要高鲁棒性视觉感知场景中具有广泛的应用前景。

图3 在DCS机器人仿真平台上的各种复杂动态背景干扰场景控制效果
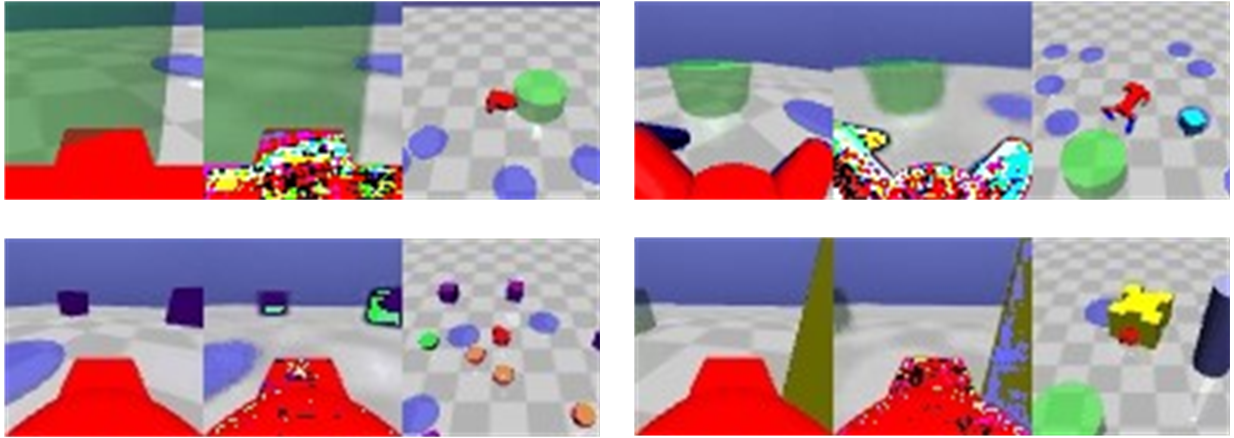
图4 在Safety Gym机器人仿真平台上的各种复杂障碍场景控制效果
针对传统强化学习方法在机器人导航和灵巧操作、工业自动化等智能系统中需要与环境实时交互且存在行为策略建模困难、低质量数据集泛化能力不足、策略分布偏移和训练不稳定等问题,提出了一系列基于数据驱动的离线强化学习方法,在现实高风险场景中具有广泛的实际部署吸引力。
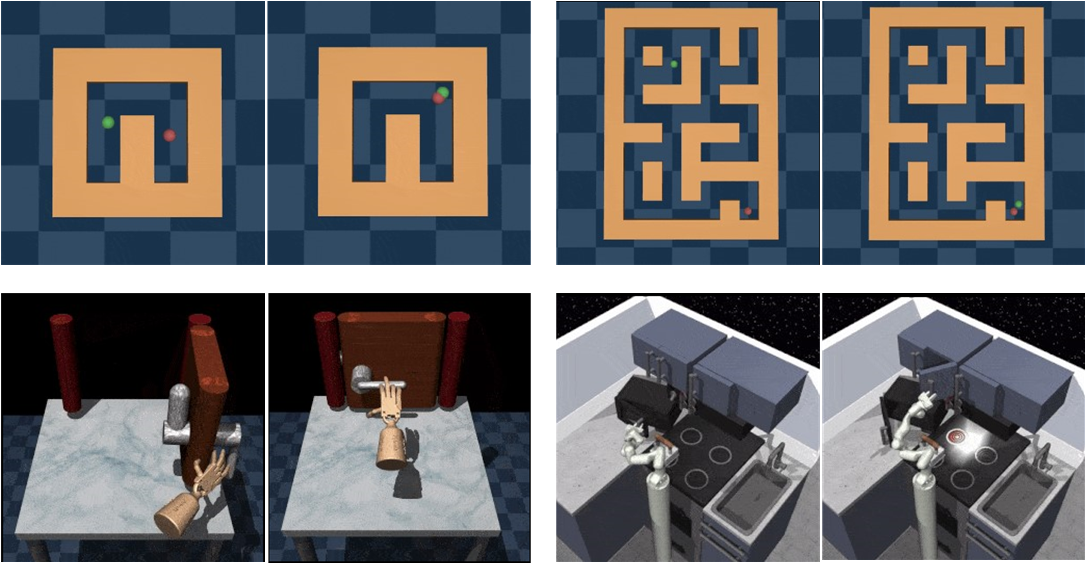
图5 Antmaze机器人导航、Adroit机器臂灵巧操作以及FrankaKitchen机器臂多任务灵巧操作的决策控制效果
2. 目标检测
针对常规目标检测算法难以对有向目标精准定位且模型提取特征困难等问题,提出了一系列有向目标检测方法。针对伪装目标检测存在的视觉一致性带来的目标边界区分难和辨识性特征学习难等问题,提出了一系列基于多源数据融合的目标检测方法。
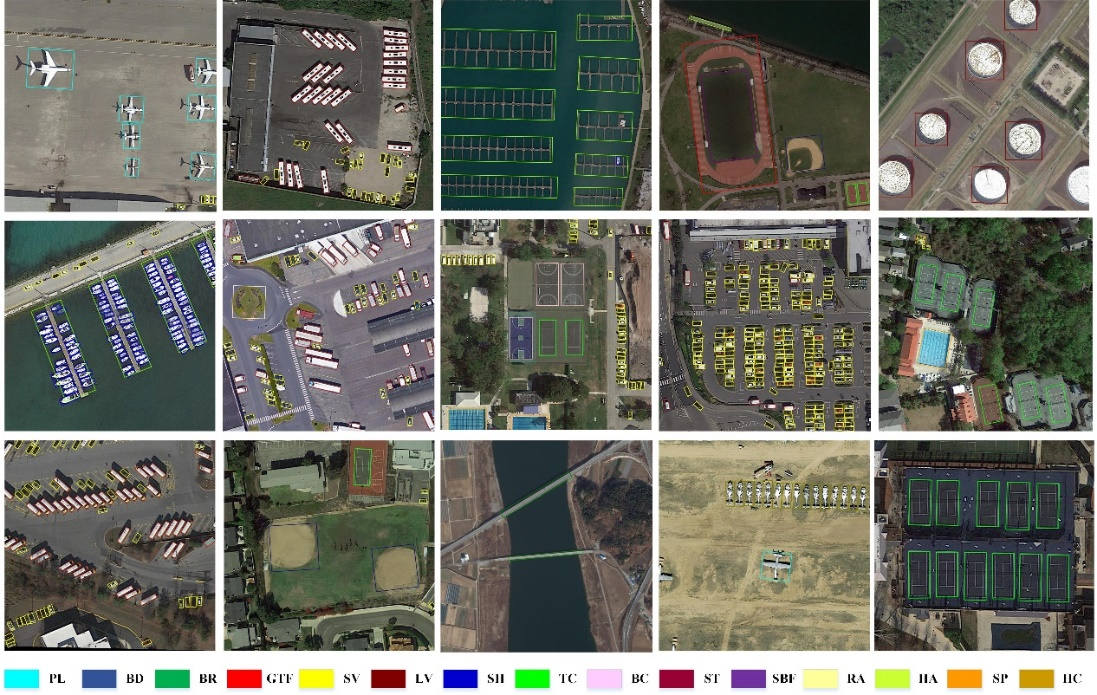
图6 在DOTA数据集上的可视化结果

图7 不同场景下的检测结果图
团队成员:王雪松教授、程玉虎教授、余强副教授、陈正升副教授、刘健副教授、孔毅副教授、邢长达副教授、周淑燕副教授、俞昆副教授、王浩宇副教授、孙琛副教授、林常见副教授、朱婉婉副教授、孙程远博士后


